DEgym
Creating New Environments with DEgym: A Comprehensive Tutorial
This tutorial demonstrates how to create custom environments by subclassing from the DEgym framework’s base Environment class. We’ll use a Continuous Stirred-Tank Reactor (CSTR) example as a practical demonstration of the complete process.
Table of Contents
- Creating New Environments with DEgym: A Comprehensive Tutorial
- Table of Contents
- Overview
- DEgym Architecture Summary
- Building a New Environment: Complete Implementation Guide
- Continuous Stirred-Tank Reactor
- Step-by-Step Implementation
- Step 1: Identify the DAE Formulation
- Step 2: Define the State
- Step 3: Defining Actions
- Step 4: Define the Physical Parameters
- Step 5: Define the Dynamics Function
- Step 6: Defining Generators for PhysicalParameters and Initial State
- Step 7: Defining Extractors
- Step 8: Create Your Environment Class
- Step 9: Create Environment Factory
- Conclusion
Overview
This tutorial demonstrates how to create custom environments using the DEgym framework, with a Continuous Stirred-Tank Reactor (CSTR) as a practical example.
[!TIP] For a comprehensive overview of DEgym’s core design principles, architecture, and philosophy, see Inside DEgym: Core Design and Usage.
DEgym Architecture Summary
DEgym separates environment logic into two categories:
- RL-related logic: Common across all use cases (data flow, interfaces,
stepfunction structure). - Use-case-related logic: Specific implementations (what actions mean, how states are defined, etc.).
The framework provides the RL-related infrastructure, while users implement only the use-case-specific components by inheriting from abstract classes. This approach enables both human developers and AI agents to create new environments systematically.
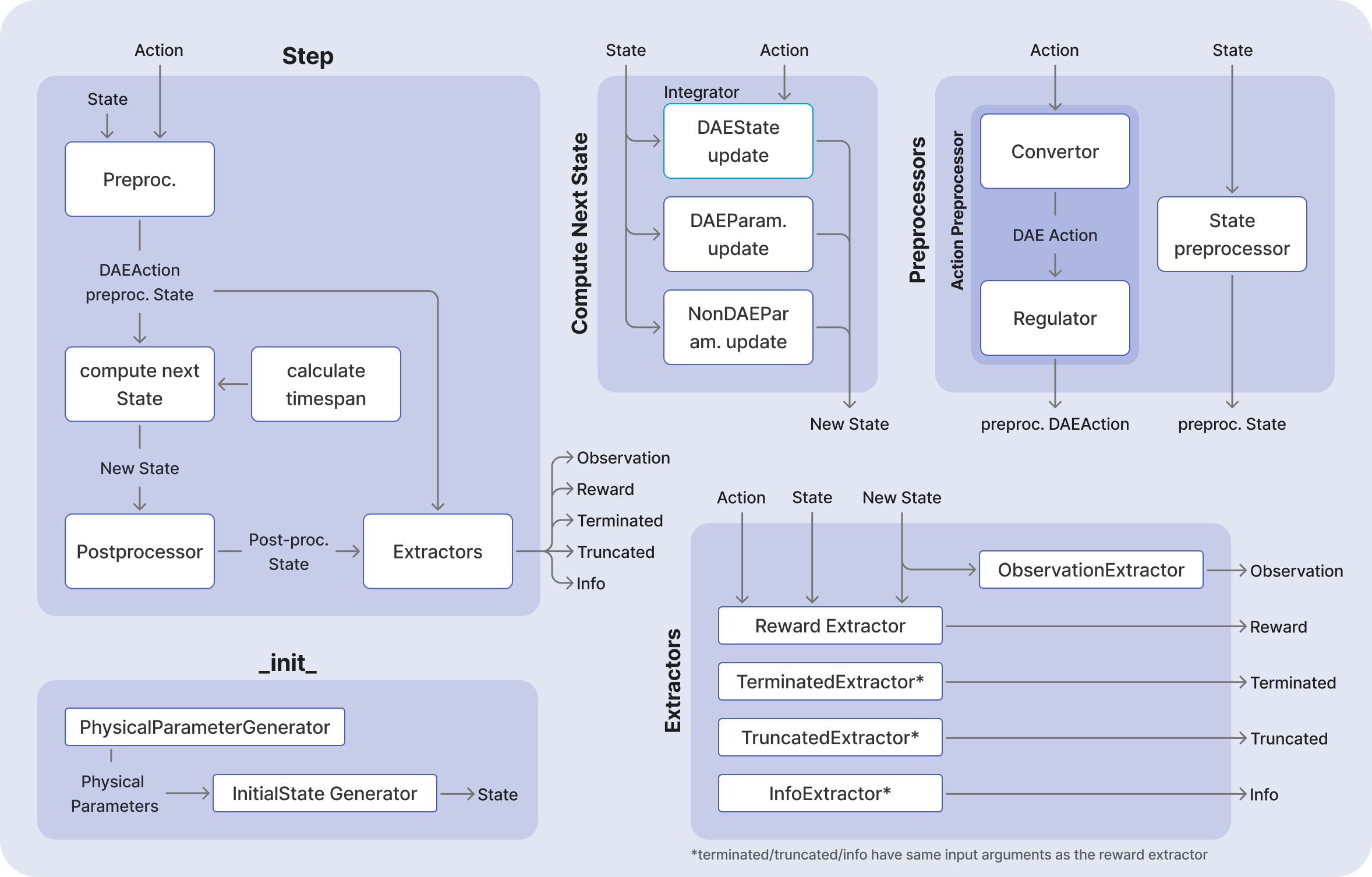
[!NOTE] For easier visualization, the above diagrams do not show the data classes which are passed between the components, nor do they indicate where the information is saved.
Building a New Environment: Complete Implementation Guide
To create a custom environment in DEgym, you need to subclass the Environment class and implement all the required abstract classes. The Environment.__init__() method requires the following components:
def __init__(
self,
physical_parameters_generator: PhysicalParametersGenerator,
initial_state_generator: InitialStateGenerator,
integrator: Integrator,
action_preprocessor: ActionPreprocessor,
state_preprocessor: StatePreprocessor,
state_postprocessor: StatePostprocessor,
observation_extractor: ObservationExtractor,
reward_extractor: RewardExtractor,
terminated_extractor: TerminatedExtractor,
truncated_extractor: TruncatedExtractor,
info_extractor: InfoExtractor,
seed: int,
) -> None:
All of the above components (except the Integrator which is already implemented) are use-case dependent and need to be implemented. In the following we use walk through one such implementation for a continuous stirred tank reactor (CSTR). To achieve that we follow the following order.
Implementation Order Recommendation
- Step 1: Identify the DAE Formulation - Identify
dae_state,dae_action,dae_params. - Step 2: Define the State Components - Implement state-related classes.
- Step 3: Define Actions - Implement action-related classes and processing.
- Step 4: Define Physical Parameters - Implement parameter classes.
- Step 5: Define the Dynamics Function - Implement system dynamics equations.
- Step 6: Define Generators - Implement parameter and initial state generators.
- Step 7: Define Extractors - Implement observation, reward, and termination extractors.
- Step 8: Create Environment Class - Implement your custom environment.
- Step 9: Create Environment Factory - Tie all components together with factory function.
List of classes with abstract methods
By the end of this tutorial all the abstract methods listed below are implemented.
| Abstract Class | Abstract Methods | Purpose |
|---|---|---|
| Environment | _calculate_time_span(), _return_next_dae_params() , _return_next_non_dae_params() |
Main environment interface |
| DAEState | to_np_array(), from_np_array() |
DAE state variables |
| DAEParameters | to_np_array(), from_np_array() |
DAE parameters |
| NonDAEParameters | to_np_array(), from_np_array() |
Non-DAE parameters |
| Action | (marker class) | Semantic representation of raw step inputs |
| DAEAction | to_np_array(), from_np_array() |
Control variables in DAE system |
| ActionConverter | _dae_action_to_action(), _action_to_dae_action() |
Convert between Action and DAE actions |
| ActionRegulator | is_legal(), convert_to_legal_action() |
Enforce action constraints |
| ActionPreprocessor | action_space (property), preprocess_action() |
Process actions before integration |
| StatePreprocessor | preprocess_state() |
Process state before integration |
| StatePostprocessor | postprocess_state() |
Process state after integration |
| SystemDynamicsFn | __call__() |
Implement system dynamics equations |
| PhysicalParameters | (marker class) | Physical system parameters |
| PhysicalParametersGenerator | generate() |
Generate physical parameters |
| InitialStateGenerator | generate() |
Generate initial states |
| Observation | to_np_array() |
RL observation interface |
| ObservationExtractor | observation_space (property), extract_observation() |
Extract observations from state |
| RewardExtractor | extract_reward() |
Extract rewards from state transitions |
| TerminatedExtractor | extract_terminated() |
Determine episode termination |
| TruncatedExtractor | extract_truncated() |
Determine episode truncation |
| InfoExtractor | extract_info() |
Extract additional information |
Continuous Stirred-Tank Reactor
In this tutorial we focus on a reversible reaction between reactant $A$ and product $B$ under ideal CSTR conditions:
\[\text{A} \overset{k_A}{\underset{k_B}{\rightleftharpoons}} \text{B}\]
- Mass balance for $A$:
\(\frac{dc_A}{dt} = \frac{F}{V} (c_{A,0} - c_A) - k_A c_A + k_B c_B\)
- Mass balance for $B$: \(\frac{dc_B}{dt} = \frac{F}{V} (-c_B) + k_A c_A - k_B c_B\)
- Energy balance equation: \(\frac{dT}{dt} = \frac{F \rho C_p (T_0 - T) + \dot{Q} - \Delta H (k_A c_A - k_B c_B)}{\rho C_p V}\)
where
- $c_A$, $c_B$ are the concentrations of species A and B.
- $F$ is the flow rate.
- $V$ is the reactor volume.
- $k_A$, $k_B$ are the reaction rates: $k_A = k_{0A} e^{-\frac{E_{aA}}{RT}}$ and $k_B = k_{0B} e^{-\frac{E_{aB}}{RT}}$ with $k_{0\mathrm{X}}$ and $E_{a\mathrm{X}}$ being the pre-exponential factor and activation energy of $\mathrm{X}$, and $R$ is the ideal gas constant. * $k_A$, $k_B$ are the reaction rates: $k_A = k_{0A} e^{-\frac{E_{aA}}{RT}}$ and $k_B = k_{0B} e^{-\frac{E_{aB}}{RT}}$ with $k_{0\mathrm{X}}$ and $E_{a\mathrm{X}}$ being the pre-exponential factor and activation energy of $\mathrm{X}$, and $R$ is the ideal gas constant. These rates determine the ratio between $A$ and $B$ at a given temperature.
- $T$ is the reactor temperature.
- $\dot{Q}$ is the heat input.
- $\rho$ is the density of the liquid.
- $C_p$ is the heat capacity.
- $\Delta H$ is the heat of reaction.
Goal and Constraints
The goal of the optimization is to maximize the production of species B by controlling the heat input $\dot{Q}$ to the reactor. This is subject to the following constraint: The heat input $\dot{Q}$ must be between 0 and $\dot{Q}_{\text{max}}$ (a positive constant).
Step-by-Step Implementation
Developing a new reactor environment involves these key steps:
Step 1: Identify the DAE Formulation
This is the most important step. One must first identify the ODEs/DAEs that govern the dynamics of the reactor and represent them in the following form:
d/dt dae_state = f(dae_state, dae_params, dae_action)
Where:
dae_state: The variables that appear on the left-hand side of the DAE (the variables that are differentiated).dae_action: The actions, which are commonly the handles for controlling the process, as they appear in the DAE formulation.dae_params: The parameters/variables that are part of the calculation offwhich are notdae_stateordae_action.
Let’s do this for the CSTR example above. We start by writing the equations (where $k_A$ and $k_B$ are expressed explicitly):
\[\frac{dc_A}{dt} = \frac{F}{V} (c_{A,0} - c_A) - k_{0A} e^{-\frac{E_{aA}}{RT}} c_A + k_B c_B\] \[\frac{dc_B}{dt} = \frac{F}{V} (-c_B) + k_{0A} e^{-\frac{E_{aA}}{RT}} c_A - k_{0B} e^{-\frac{E_{aB}}{RT}} c_B\] \[\frac{dT}{dt} = \frac{F \rho C_p (T_0 - T) + \dot{Q} - \Delta H (k_{0A} e^{-\frac{E_{aA}}{RT}} c_A - k_{0B} e^{-\frac{E_{aB}}{RT}} c_B)}{\rho C_p V}\]Now, the equations are ready to be used for identifying dae_state, dae_action, and dae_params in two steps. In each step:
- based on simple rules, we identify a group of variables from the equations and assign them to one of the variables above; and
- remove those identified variables from the equations.
To make this process clearer, we depict the outcome of the different step process visually. All the variables that are identified at each step are highlighted in red (for their first appearance and in gray for further appearances), and then covered after removing them.
Step 1.1: Identifying dae_state
Rule: All the variables appearing on the left-hand side of the equations, shown in red color (and highlighted in gray when they also appear on the right-hand side). In the case of ODEs, these are all the differentiated variables.
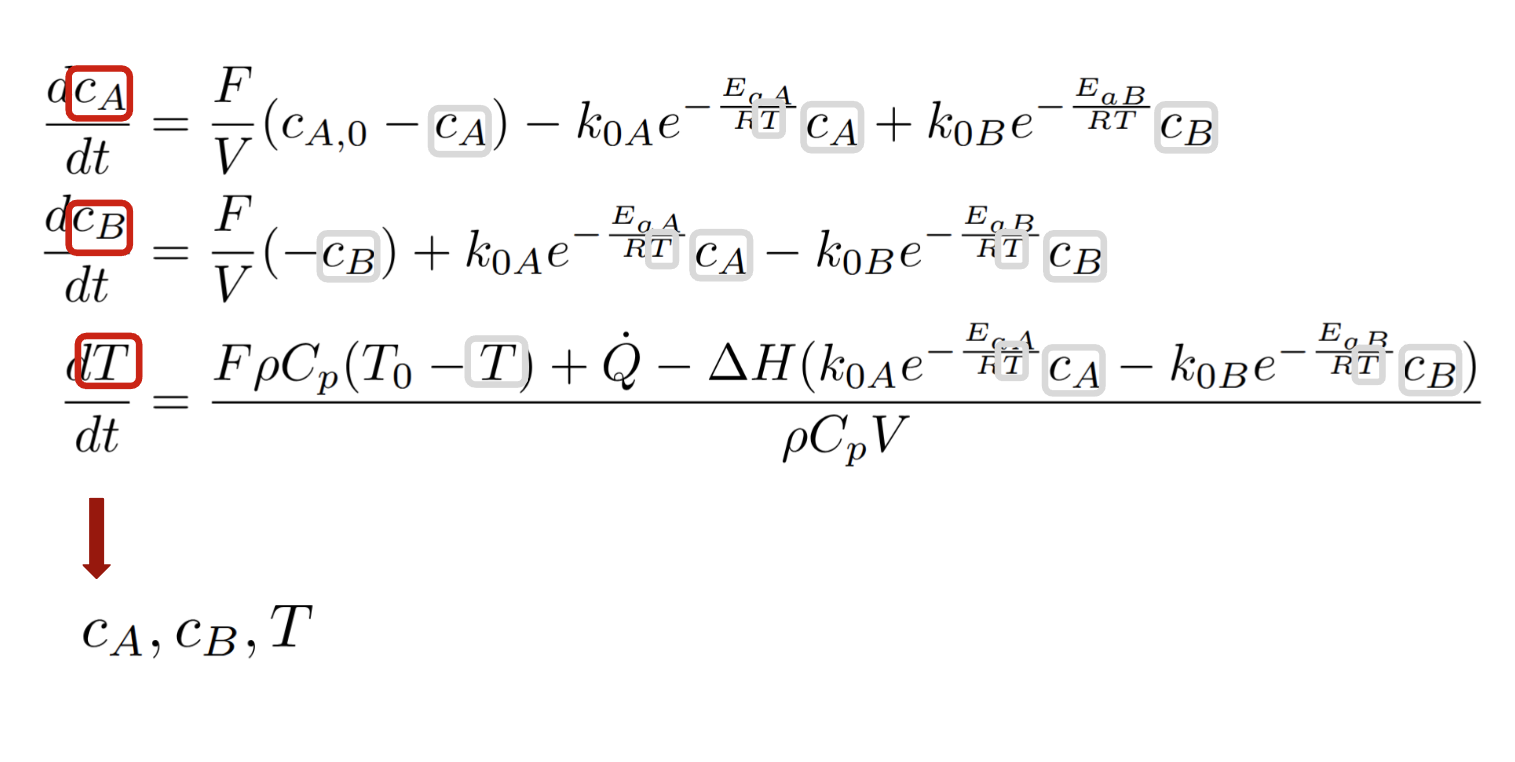
In the example used here, $c_A$, $c_B$ and $T$ form dae_state. To create the DAE state for CSTR (CSTRDAEState) we inherit from the DAEState class and implement the abstract methods (as shown below).
[!TIP] This inheritance is a procedure that we follow throughout creating a new environment: we inherit from
degymabstract classes and implement the abstract components based on the concrete use case.
class CSTRDAEState(DAEState):
"""
DAEState class for CSTR.
Attributes:
c_a: Concentration of species A
c_b: Concentration of species B
T: Current temperature of system
"""
c_a: float
c_b: float
T: float
def to_np_array(self) -> NDArray:
"""Concatenate all the attributes."""
return np.asarray(
[
self.c_a,
self.c_b,
self.T,
]
)
@classmethod
def from_np_array(cls, np_array: NDArray) -> "DAEState":
"""Return a new instance of the class from a numpy array."""
return CSTRDAEState(
c_a=np_array[0],
c_b=np_array[1],
T=np_array[2],
)
The abstract methods of DAEState (i.e., from_np_array and to_np_array) are used in the flow of information, e.g., for passing an instance of DAEState to the integrator, it is first converted to a numpy array.
For clarity, we remove these variables from the equations by covering them under a gray box.
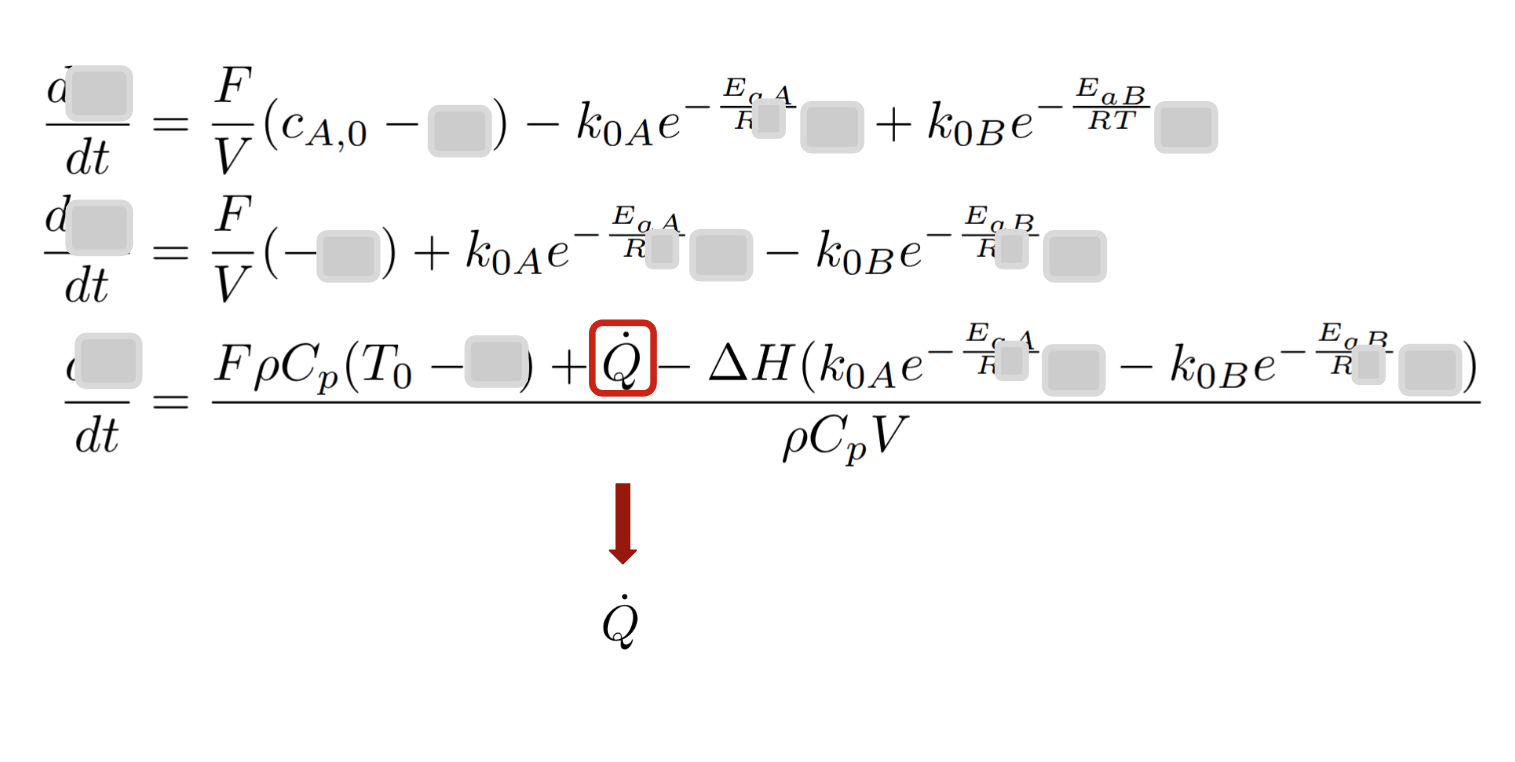
Step 1.2: Identifying dae_action
Rule: All the variables related to actions/control as they appear in the DAE formulation
class CSTRDAEAction(DAEAction):
"""
Action as it appears in the DAE system.
Attributes:
q_dot: Heat being applied to the system.
"""
q_dot: float
def to_np_array(self) -> NDArray[np.floating]:
"""Return the action as a numpy array."""
return np.array([self.q_dot])
@classmethod
def from_np_array(cls, np_array: NDArray[np.floating]) -> "CSTRDAEAction":
"""
Return a new instance of the class from a numpy array.
Args:
np_array: Numpy array with shape (1,).
Returns:
CSTRDAEAction: Instance of the class.
Raises:
ValueError: If the shape of the numpy array is not (1,).
"""
if np_array.shape != (1,):
raise ValueError(f"Expected shape (1,) but got {np_array.shape}")
return CSTRDAEAction(q_dot=np_array[0])
Similar to variables identified in the previous step, we remove the current variables from the equations by covering them under a gray box.
Step 1.3: Identifying dae_params
Rule: Any other remaining variables belong to parameters.
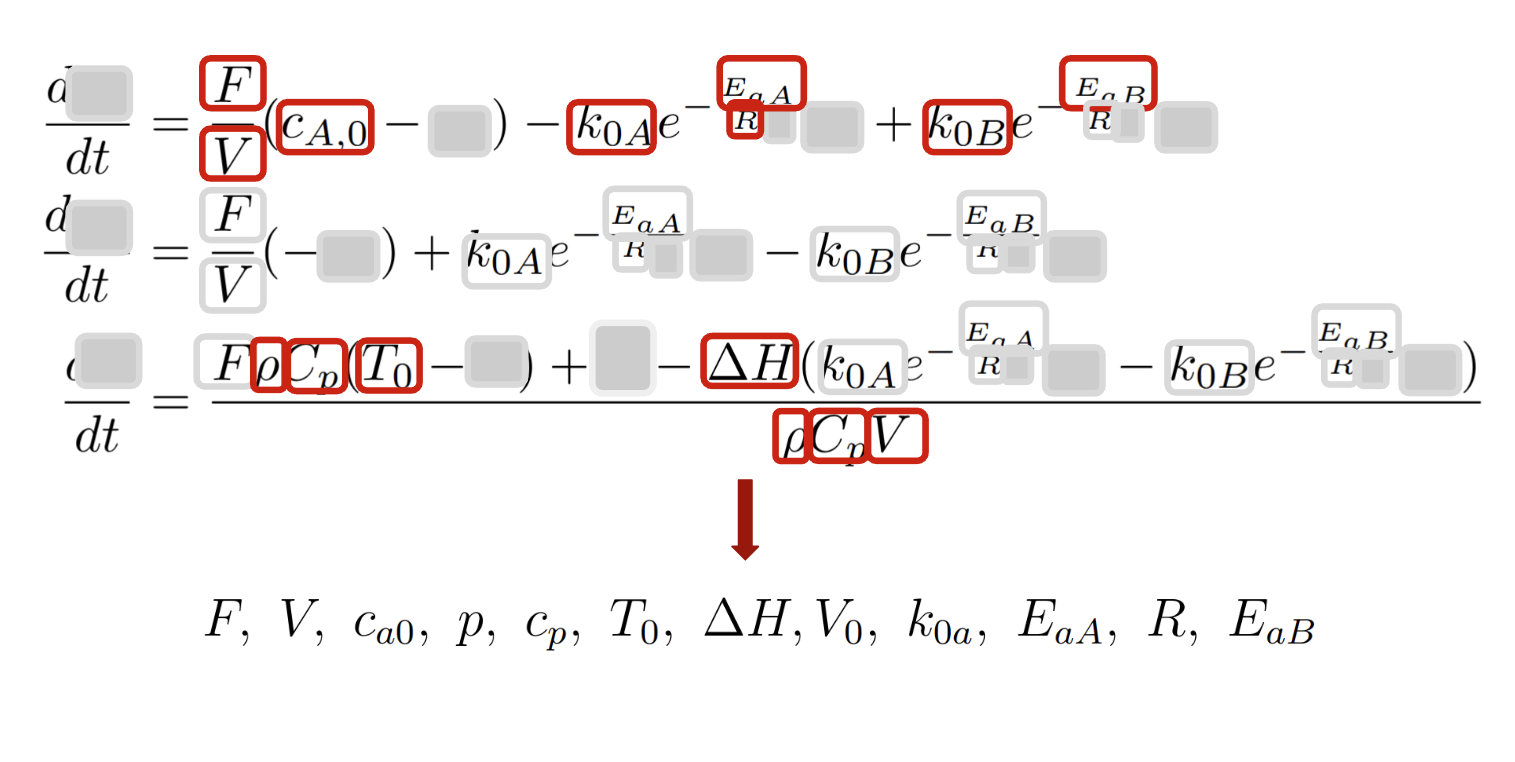
If, similar to the previous steps, we cover these variables, there would be no other variables left in the equations.
The concrete implementation of CSTRDAEParameters can be found in the corresponding file.
[!IMPORTANT]
dae_stateis not necessarily the same as the state of the reactor. It represents only the variables that appear on the left-hand side of the DAE.dae_paramsare not necessarily the parameters needed to configure the environment (those provided in YAML files), although there could be overlap.- The state of the environment is represented by the
Stateclass which includesdae_state,dae_params, andnon_dae_params(as explained below).
Step 2: Define the State
After identifying the DAE, you need to implement a subclass of State. Let’s clarify what State is and what it is not:
The State class represents the “internal” state of the environment. This internal state includes all the variables/parameters required to fully describe the environment at any point in time. In other words, the State has enough information to set the environment to any step in an episode.
More explicitly, the State has three parts:
dae_state: DAEState: Variables that appear on the left-hand side of the DAE (See above).dae_params: DAEParameters: Parameters used in DAE calculations (See above).non_dae_params: NonDAEParameters: Parameters that are not part of the differential equations.
2.1. dae_state: DAEState
Refer to Step 1.1.
2.2. dae_params: DAEParameters
Refer to Step 1.2.
2.3. non_dae_params: NonDAEParameters
The non_dae_params contains all the necessary parameters for configuring the environment which are not part of the DAE. For example:
- Parameters used for configuring constraints (e.g., maximum value of a variable or action).
- Parameters that appear indirectly in the DAE (e.g., variables used to calculate
dae_params).
To identify these parameters, go through the description of the problem, collect all the parameters, and then remove the ones appearing in the DAE.
For the case of CSTR, the maximum heating capacity and the duration of one episode are such parameters:
class CSTRNonDAEParameters(DAEParameters):
"""
Non-DAE parameters for the CSTR problem.
Attributes:
q_max: Maximum heat that can be applied at each timestep.
max_timestep: Number of minutes to run.
timestep: Current timestep.
"""
q_max: float
max_timestep: int # Number of minutes to run
timestep: int = 0 # Current timestep
def to_np_array(self) -> NDArray:
"""Concatenate all the attributes."""
return np.asarray(
[
self.q_max,
self.max_timestep,
self.timestep,
]
)
@classmethod
def from_np_array(cls, np_array: NDArray) -> "DAEParameters":
"""Return a new instance of the class from a numpy array."""
return CSTRNonDAEParameters(
q_max=np_array[0],
max_timestep=np_array[1],
timestep=np_array[2],
)
Step 2.4: State Preprocessor
Within the step function, as the first computation, the state and the action are preprocessed. The prefix pre- here refers to before integrating the dynamical equations.
The preprocessing of the action is done by ActionPreprocessor (See “Defining Action Preprocessor” subsection below).
The preprocessing of the state is an identity operation in the case of CSTR, i.e., the state is used without processing. Therefore, the implementation of the CSTRStatePreprocessor is simply subclassing StatePreprocessor and implementing its abstract method with an identity operation.
class CSTRStatePreprocessor(StatePreprocessor): # noqa: D101
def preprocess_state(self, state: CSTRState) -> CSTRState:
"""No preprocessing of the state is needed."""
return state
Step 3: Defining Actions
In DEgym, we distinguish three representations in the action processing pipeline:
- Raw step input: The actual input passed to the
step()function (e.g., numpy arrays, scalars, dicts). - Action (semantic): An intermediate representation that gives semantic meaning to raw inputs.
- DAEAction: The control variables as they appear in the differential equation formulation.
The flow is: Raw Step Input → Action (semantic) → DAEAction (physical parameters)
For example:
- Raw input:
0.8passed tostep()(a float between 0 and 1). - Action:
CSTRAction(q_normalized=0.8)(semantic meaning - normalized heat input). - DAEAction:
CSTRDAEAction(q=4000.0)(physical heat input that appears in differential equations).
Step 3.1: Defining DAEAction
To identify the DAE action, see Step 1.2.
Step 3.2: Defining Action
The Action class provides semantic meaning to raw step inputs. It transforms raw numerical data into structured, interpretable representations before conversion to physical control parameters. In the case of CSTR, for example, we define this action to interpret a raw scalar as normalized heat input:
@dataclass(frozen=True)
class CSTRAction(Action):
"""
Action class for CSTR problem.
The agent selects a continuous action in the range [0, 1],
which relates to heat being applied in the range [0, Q_max].
"""
q_normalized: float # Normalized heat input [0, 1]
Note that the Action class serves as an intermediate semantic layer that makes control logic more interpretable and debuggable, while DAEAction contains the actual control variables used in differential equations.
Step 3.3: Defining The Converter Between Action and DAEAction
DEgym requires a converter between semantic actions and DAE control parameters. In the case of CSTR, this involves simple scaling from normalized to physical units. To write this converter, we inherit from the ActionConverter class and implement the abstract methods:
class CSTRActionConverter(ActionConverter):
"""
Action converter for the CSTR.
"""
def _action_to_dae_action(self, action: CSTRAction, state: CSTRState) -> CSTRDAEAction:
"""Multiply the RL action by q_max to denormalize."""
q = action.q_normalized * state.non_dae_params.q_max
return CSTRDAEAction(q=q)
def _dae_action_to_action(self, dae_action: CSTRDAEAction, state: CSTRState) -> CSTRAction:
"""Divide the RL action by q_max to normalize."""
q_normalized = dae_action.q / state.non_dae_params.q_max
return CSTRAction(q_normalized=q_normalized)
Step 3.4: Define Action Regulator
In case there are constraints on the actions, one can impose those constraints via ActionRegulators. As these constraints are commonly expressed as business rules, in DEgym, the action regulators act on DAEAction. The abstract methods are is_legal and convert_to_legal_action. In this example, a valid (legal) action is a heat intensity between zero and the maximum allowed value (which is set in the config). The convert_to_legal_action method clips the actions to be in the valid range.
class CSTRActionRegulator(ActionRegulator):
"""
Action regulator for the CSTR problem.
"""
def is_legal(
self,
dae_action: CSTRDAEAction,
state: CSTRState,
) -> bool:
"""The action is legal if the heat stays within the bounds."""
is_legal: bool = 0 <= dae_action.q <= state.non_dae_params.q_max
return is_legal
def convert_to_legal_action(self, dae_action: CSTRDAEAction, state: CSTRState) -> CSTRDAEAction:
"""If illegal action outside [0, q_max] then clamp it."""
if dae_action.q <= 0:
return CSTRDAEAction(q=0.0)
if dae_action.q >= state.non_dae_params.q_max:
return CSTRDAEAction(q=state.non_dae_params.q_max)
return dae_action
Step 3.5: Define Action Preprocessor
ActionPreprocessor orchestrates the complete action processing pipeline that transforms raw step inputs into validated DAE control parameters. This is done by:
- Wrapping raw input: Converting raw step input (arrays, scalars) into semantic Action objects.
- Semantic conversion: Using
ActionConverterto transform Action to DAEAction. - Constraint enforcement: Applying
ActionRegulatorto ensure DAEAction compliance.
The abstract methods that need to be implemented are action_space (property) and preprocess_action.
class CSTRActionPreprocessor(ActionPreprocessor):
"""Action preprocessor for the CSTR problem."""
@property
def action_space(self) -> gym.spaces.Box:
"""CSTR RL action space: normalized heat in [0, 1]"""
return gym.spaces.Box(low=0.0, high=1.0, shape=(1,))
def preprocess_action(self, action: float, state: CSTRState) -> CSTRDAEAction:
"""
Preprocess a raw scalar action to validated DAEAction.
Args:
action: Raw scalar action from agent (normalized heat input).
state: Current state of the environment.
Returns:
CSTRDAEAction: Preprocessed action for integration.
"""
# Step 1: Wrap raw input into semantic Action
semantic_action = CSTRAction(q_normalized=action)
# Step 2: Convert to DAE parameters
dae_action = self.action_converter.action_to_dae_action(semantic_action, state)
# Step 3: Apply constraints
if self.action_regulator.is_legal(dae_action, state):
return dae_action
else:
return self.action_regulator.convert_to_legal_action(dae_action, state)
Step 4: Define the Physical Parameters
Physical parameters are all the parameters needed to calculate dae_params and non_dae_params. These are the parameters generated during the initialization of the environment (or its reset).
[!NOTE] The set of physical parameters could have overlap with
dae_paramsandnon_dae_params, but they are not necessarily the same. For example, a categorical parameter could be the make/model of the reactor, from which volume is determined (and used indae_paramsas $V$ appears in the dynamical equations). In the current example, this is not the case. The physical parameters are the result of the union ofdae_paramsandnon_dae_params.
@dataclass(frozen=True)
class CSTRPhysicalParameters(PhysicalParameters):
"""
Physical constants for the CSTR problem.
Attributes:
p: liquid density.
c_a_0: Initial concentration of A.
c_p: Heat capacity of the tank.
e_a: Activation energy of A -> B.
e_b : Activation energy of B -> A.
F: Flow rate in and out of the reactor.
dh: Heat of the reaction.
k_0_a: Pre-exponential factor for A -> B.
k_0_b: Pre-exponential factor for B -> A.
R: Ideal gas constant.
T_0: Initial temperature in the reactor.
V: Tank volume.
q_max: Max heat that can be applied at each timestep.
max_timestep: Number of minutes to run.
"""
p: float = 780 # kg/m³
c_a_0: float = 0.3 # kmol/m³
c_p: float = 3.25 # kJ/kgK
e_a: float = 41570 # kJ / kmol
e_b: float = 45727 # kJ / kmol
F: float = 0.0025 # m³/min
dh: float = 4157 # kJ / kmol
k_0_a: float = 50_000 # min-1
k_0_b: float = 100_000 # min-1
R: float = 8.314 # kJ / kmol −K
T_0: float = 300 # K
V: float = 0.2 # m³
q_max: float = 5000 # kJ/min
max_timestep: int = 600 # mins
def to_np_array(self) -> NDArray[np.floating]:
"""Concatenate all the attributes."""
return np.asarray(list(asdict(self).values()))
The numerical values of the above physical parameters are derived from “Dynamic Economic Optimization of a Continuously Stirred Tank Reactor Using Reinforcement Learning,” by D. Machalek, et al. 2020.
Step 5: Define the Dynamics Function
The dynamics function calculates the derivative of the dae_state given the current state of the environment. This function is used in the integration of the DAE and should be implemented as a subclass of DiffeqpySystemDynamicsFn or ScipySystemDynamicsFn.
Note that this is the most manual step in the process and the most error-prone. One must be very careful in implementing the __call__ function.
For both cases, one should implement the __call__ function, in which the dynamical equations are implemented. The signature depends on the integrator (where signature variables are explained below):
For ScipySystemDynamicsFn:
def __call__(
state: NDArray[np.floating],
parameters: NDArray[np.floating],
action: NDArray[np.floating],
time: float,
) -> NDArray[np.floating]:
For DiffeqpySystemDynamicsFn:
def __call__(
derivative: list[float],
input_values: NDArray[np.floating],
parameters: NDArray[np.floating],
time: NDArray[np.floating],
) -> None:
Step 5.1a: Defining Dynamical Equations for Scipy Integrator
For the scipy integrator, the arguments to the __call__ function are:
statewhich corresponds exactly toDAEState.parameterswhich corresponds exactly toDAEParameters.actionwhich is exactlyDAEAction; andtimewhich is the time as it appears in the dynamical equations (in the CSTR case there is no explicit time dependence).
These arguments are used to return the left-hand side of the dynamical equations, i.e., d DAEState / dt as a numpy array.
[!NOTE] This split of arguments is in line with the logic of how parameters are grouped together in DEgym. To showcase that, in the following implementation, these arguments are converted to their counterpart DEgym classes at the beginning of the
__call__function.
class CSTRScipySystemDynamics(ScipySystemDynamicsFn): # noqa: D101
@staticmethod
def __call__(
state: NDArray[np.floating],
parameters: NDArray[np.floating],
action: NDArray[np.floating],
time: float,
) -> NDArray[np.floating]:
"""
Implement the dynamical model of CSTR.
Differential equations:
(1): dc_a/dt = (F / V) * (c_a0 − c_a)− k_a c_a + k_b * c_b
(2): dc_b/dt = (F / V) * (− c_b) + k_a c_a - k_b * c_b
(3): dT/dt = (F * p * c_p (T_0 - T) + q - dh * V
* (k_a * c_a - k_b * c_b)) / (p * c_p * V)
With:
k_a = k_0_a * exp(-e_a / rt)
k_b = k_0_b * exp(-e_b / rt)
"""
s = CSTRDAEState.from_np_array(state) # dae state
pm = CSTRDAEParameters.from_np_array(parameters) # dae parameters
a = CSTRDAEAction.from_np_array(action) # dae action
k_a = reaction_rate(k_0=pm.k_0_a, e=pm.E_a_A, r=pm.R, t=s.T)
k_b = reaction_rate(k_0=pm.k_0_b, e=pm.E_a_B, r=pm.R, t=s.T)
# Differential equations.
delta_c_a = (pm.F / pm.V) * (pm.c_a_0 - s.c_a) - (k_a * s.c_a) + (k_b * s.c_b) # d[A]/dt
delta_c_b = (pm.F / pm.V) * (-s.c_b) + (k_a * s.c_a) - (k_b * s.c_b) # d[B]/dt
delta_T = (
pm.F * pm.p * pm.c_p * (pm.T_0 - s.T) + a.q - pm.dh * pm.V * (k_a * s.c_a - k_b * s.c_b)
) / (pm.p * pm.c_p * pm.V) # dT/dt
return np.array([delta_c_a, delta_c_b, delta_T])
Step 5.1b: Defining Dynamical Equations for DiffEqPy Integrator
Unlike the scipy integrator, DiffEqPy requires a less straightforward signature for the __call__ function. The arguments are:
derivative: a list of floats which isd DAEState / dt. Note that this argument is set in place, i.e., at the end of the computation of time derivatives, the obtained values are placed in this list.input_valuescorresponds exactly to variables inDAEState.parameterscontains both variables inDAEParametersandDAEAction, where the parameters appear first and the actions appear last.timeis time as it explicitly appears in the dynamical equations (in the CSTR example there is no explicit time dependence).
[!NOTE] One should be very careful about how to extract
DAEParametersandDAEActionfromparameters. For example, if the action space is changed, this split should be explicitly changed.
class CSTRDiffeqpySystemDynamics(DiffeqpySystemDynamicsFn): # noqa: D101
# state has 3 values: {c_a, c_b, t}
# We have differential equations for all 3 values => Identity matrix
mass_matrix = np.eye(3, 3)
@staticmethod
def __call__(
derivative: list[float],
input_values: NDArray[np.floating],
parameters: NDArray[np.floating],
time: NDArray[np.floating],
) -> None:
"""
Implement the dynamical model of CSTR.
Differential equations:
(1): dc_a/dt = (F / V) * (c_a0 − c_a)− k_a c_a + k_b * c_b
(2): dc_b/dt = (F / V) * (− c_b) + k_a c_a - k_b * c_b
(3): dT/dt = (F * p * c_p (T_0 - T) + q - dh * V
* (k_a * c_a - k_b * c_b)) / (p * c_p * V)
With:
k_a = k_0_a * exp(-e_a / rt)
k_b = k_0_b * exp(-e_b / rt)
"""
s = CSTRDAEState.from_np_array(input_values) # dae state
pm = CSTRDAEParameters.from_np_array(parameters[:-1]) # dae parameters
a = CSTRDAEAction.from_np_array(parameters[-1:]) # dae action
k_a = reaction_rate(k_0=pm.k_0_a, e=pm.E_a_A, r=pm.R, t=s.T)
k_b = reaction_rate(k_0=pm.k_0_b, e=pm.E_a_B, r=pm.R, t=s.T)
# Differential equations.
derivative[0] = (
(pm.F / pm.V) * (pm.c_a_0 - s.c_a) - (k_a * s.c_a) + (k_b * s.c_b)
) # d[A]/dt
derivative[1] = (pm.F / pm.V) * (-s.c_b) + (k_a * s.c_a) - (k_b * s.c_b) # d[B]/dt
derivative[2] = (
pm.F * pm.p * pm.c_p * (pm.T_0 - s.T) + a.q - pm.dh * pm.V * (k_a * s.c_a - k_b * s.c_b)
) / (pm.p * pm.c_p * pm.V) # dT/dt
Step 6: Defining Generators for PhysicalParameters and Initial State
DEgym requires two generators for instantiation and reset:
-
A subclass of PhysicalParametersGenerator which generates an instance of
PhysicalParameters. Having a generator instead of just using an instance ofPhysicalParametersenables us to create (random) variation in parameters of the environment. For example, if a use case requires training an agent for controlling a reactor where the $\Delta H$ is coming from a random distribution, one can realize that with the generator. -
A subclass of
InitialStateGeneratorwhich generates an instance ofStateas the initial state of the environment. Similar to the physical parameter generator, a generator can set the environment in different initial states every time an instance of the environment is created or reset.
Step 6.1: Defining PhysicalParameters Generator
For the CSTR use case, similar to any concrete reactor, we create a subclass of PhysicalParametersGenerator and implement its abstract method generate with the following signature:
class PhysicalParametersGenerator(ABC):
"""Generator for physical parameters of the system."""
@abstractmethod
def generate(self, rng: np.random.Generator) -> PhysicalParameters:
"""Generate a set of physical parameters describing an instantiation of the system."""
[!NOTE] The logic with which the physical parameters are generated is irrelevant for DEgym. For example, in the CSTR case we implemented
CSTRPhysicalParametersGeneratorwhich returns an instance ofCSTRPhysicalParameterswhere some of the parameters are generated randomly and some have fixed values. Whether a parameter has fixed values or it is derived from a distribution is configured by a config.
For details of the implementation refer to physical_parameters.py in degym_tutorial/.
Step 6.2: Defining Initial State Generator
To develop an initial state generator, one can subclass InitialStateGenerator and implement its only abstract method which is generate. Note that to generate an initial state one requires knowing the physical parameters of the system. Therefore, an instance of PhysicalParameters (or CSTRPhysicalParameters in the case of the CSTR example) is passed to the generate function.
class CSTRInitialStateGenerator(InitialStateGenerator):
"""InitialStateGenerator class for the CSTR problem."""
def generate(self, physical_parameters: CSTRPhysicalParameters) -> CSTRState:
"""Return the initial state given a set of physical parameters for the system."""
dae_state = CSTRDAEState(
c_a=physical_parameters.c_a_0,
c_b=0.0,
T=physical_parameters.T_0,
)
dae_params = CSTRDAEParameters(
F=physical_parameters.F,
V=physical_parameters.V,
c_a_0=physical_parameters.c_a_0,
p=physical_parameters.p,
c_p=physical_parameters.c_p,
T_0=physical_parameters.T_0,
dh=physical_parameters.dh,
k_0_a=physical_parameters.k_0_a,
k_0_b=physical_parameters.k_0_b,
E_a_A=physical_parameters.e_a,
E_a_B=physical_parameters.e_b,
R=physical_parameters.R,
)
non_dae_params = CSTRNonDAEParameters(
q_max=physical_parameters.q_max,
max_timestep=physical_parameters.max_timestep,
timestep=0,
)
return CSTRState(dae_state=dae_state, dae_params=dae_params, non_dae_params=non_dae_params)
Step 7: Defining Extractors
Extractors convert the internal state to the return values of the step function dictated by Gymnasium’s convention:
(i) observation, (ii) reward, (iii) terminated, (iv) truncated, (v) info. In the following, we explain the observation extractor in detail and the other extractors are briefly described.
[!NOTE] These extractors are called at the very end of the
stepfunction.
Step 7.1: Observation Extractor
The observation extractor converts the internal state to the observation that the RL agent receives. To implement this extractor:
- first we need to implement a class for observation by subclassing the
Observationclass and implementing its abstract method, i.e.to_np_array; and then - subclass the
ObservationExtractorclass and implement its abstract method and property, i.e.,extract_observationandobservation_space.
@dataclass(frozen=True)
class CSTRObservation(Observation):
"""Observation returned to the RL agent for CSTR."""
normalized_c_a: float # Normalized concentration of A
normalized_c_b: float # Normalized concentration of B
normalized_temperature: float # Normalized temperature
def to_np_array(self) -> NDArray[np.floating]:
"""Convert observation to numpy array."""
return np.array([self.normalized_c_a, self.normalized_c_b, self.normalized_temperature])
class CSTRObservationExtractor(ObservationExtractor):
"""Extract observations from CSTR state."""
@property
def observation_space(self) -> gym.spaces.Box:
"""Define the observation space for RL agents."""
return gym.spaces.Box(
low=np.array([0.0, 0.0, 0.0]),
high=np.array([1.0, 1.0, 2.0]),
shape=(3,),
dtype=np.float32
)
def extract_observation(self, next_state: CSTRState) -> CSTRObservation:
"""Convert state to observation by normalizing values."""
# Normalize concentrations by initial concentration
c_a_normalized = next_state.dae_state.c_a / next_state.dae_params.c_a_0
c_b_normalized = next_state.dae_state.c_b / next_state.dae_params.c_a_0
# Normalize temperature by initial temperature
t_normalized = next_state.dae_state.T / next_state.dae_params.T_0
return CSTRObservation(
normalized_c_a=c_a_normalized,
normalized_c_b=c_b_normalized,
normalized_temperature=t_normalized
)
[!NOTE]
- The observation depends only on
next_state.next_statehere refers to the state of the environment after the postprocessing (which comes after the application of action).
Steps 7.2-7.5: Defining Extractors for Reward, Terminated, Truncated, and Info
All the remaining extractors:
- are simpler than the observation extractor as their return types are basic Python types, i.e.,
float,bool, anddict; and - they share the same list of arguments:
self, state: State, action: DAEAction, next_state: State.
In their argument list:
stateis theStateat the beginning of thestep(i.e., before application of action).actionis the action taken in the step.next_state: The state at the end of thestepafter the postprocessing (which comes after the application of action).
As an example here we show CSTRRewardExtractor:
class CSTRRewardExtractor(RewardExtractor): # noqa: D101
def extract_reward(
self, state: CSTRState, action: CSTRDAEAction, next_state: CSTRState
) -> float:
"""Immediate reward is the concentration of the product, c_B."""
return float(next_state.dae_state.c_b)
Step 8: Create Your Environment Class
In the Environment class of DEgym, there are also two abstract methods that should be implemented:
-
_calculate_time_span: where one calculates the time span covered by thestepfunction. This function is called inside the step function, before the integration. It is used for setting the beginning and end of the time integration for the current call tostep. Note that this function enables us to have variable time spans across calls to the step function, which is a relevant feature for chemical/biological reactors. _return_next_dae_params: updates and returns thedae_params._return_next_non_dae_params: updates and returns thenon_dae_params.
[!NOTE] Non-DAE Parameters can change with time. For example, the cost of energy which does not appear in chemical reactions might change with time; it has its own dynamics which require an update during the step for the given time span.
Step 8.1: Calculation of time span
In the CSTR environment we assume a fixed constant time span across all steps. In this case, the logic of the time span computation is straightforward:
class CSTREnvironment(Environment):
"""
Environment for the CSTR problem.
"""
def _calculate_time_span(self) -> TimeSpan:
"""Calculate the time span of step function."""
time_span = TimeSpan(
start_time=self._current_time,
end_time=self._current_time + self._integrator.config.action_duration,
)
return time_span
Step 8.2: Computing Next DAEParameters and NonDAEParameters
These methods allow us to have a time dependence for dae_params as well as non_dae_params.
def _return_next_dae_params(self, state: CSTRState) -> CSTRDAEParameters:
"""Return the current DAE parameters as the next DAE parameters."""
return state.dae_params
def _return_next_non_dae_params(self, state: CSTRState) -> CSTRNonDAEParameters:
"""Return the next non-DAE parameters by incrementing the timestep."""
state.non_dae_params.timestep += 1
return state.non_dae_params
Step 9: Create Environment Factory
We are almost done! Here is a factory function to instantiate your CSTR environment from a config!
def make_cstr_environment(env_config: dict) -> CSTREnvironment: # pylint: disable=too-many-locals
"""
Instantiate and return a CSTR environment.
Args:
a dict which includes all the configs of the environment.
Returns:
an environment.
"""
physical_parameter_generator_config = CSTRPhysicalParametersGeneratorConfig(
**env_config["physical_parameters"]
)
physical_parameters_generator = CSTRPhysicalParametersGenerator(
config=physical_parameter_generator_config
)
# Prepare preprocessing classes
action_regulator = CSTRActionRegulator()
action_converter = CSTRActionConverter()
action_preprocessor = CSTRActionPreprocessor(
action_converter=action_converter, action_regulator=action_regulator
)
state_preprocessor = CSTRStatePreprocessor()
# Prepare integrator
if env_config["integrator"] == "diffeqpy":
system_dynamics = CSTRDiffeqpySystemDynamics()
integrator_config = DiffeqpyIntegratorConfig(**env_config["integrator_config"])
integrator = DiffeqpyIntegrator(
system_dynamics=system_dynamics, integrator_config=integrator_config
)
elif env_config["integrator"] == "scipy":
system_dynamics = CSTRScipySystemDynamics()
integrator_config = ScipyIntegratorConfig(**env_config["integrator_config"])
integrator = ScipyIntegrator(
system_dynamics=system_dynamics, integrator_config=integrator_config
)
else:
raise NotImplementedError(f"Integrator {env_config['integrator']} not implemented")
# Prepare extractors + state postprocessor
observation_extractor = CSTRObservationExtractor()
reward_extractor = CSTRRewardExtractor()
terminated_extractor = CSTRTerminatedExtractor()
truncated_extractor = CSTRTruncatedExtractor()
info_extractor = CSTRInfoExtractor()
state_postprocessor = CSTRStatePostprocessor()
# Instantiate CSTR Environment
env = CSTREnvironment(
physical_parameters_generator=physical_parameters_generator,
initial_state_generator=CSTRInitialStateGenerator(),
integrator=integrator,
action_preprocessor=action_preprocessor,
state_preprocessor=state_preprocessor,
state_postprocessor=state_postprocessor,
observation_extractor=observation_extractor,
reward_extractor=reward_extractor,
terminated_extractor=terminated_extractor,
truncated_extractor=truncated_extractor,
info_extractor=info_extractor,
seed=env_config["random_seed"],
)
return env
Having this factory, we can now easily create an environment and interact with it:
import numpy as np
from degym_tutorials.cstr_tutorial.make_env import make_cstr_environment
# For the reference of the physical parameters see:
# D. Machalek, T. Quah and K. M. Powell,
# "Dynamic Economic Optimization of a Continuously Stirred Tank Reactor Using Reinforcement Learning,"
# 2020 American Control Conference (ACC), Denver, CO, USA, 2020, pp. 2955-2960,
# doi: 10.23919/ACC45564.2020.9147706.
env_config = {
"integrator": "scipy",
"integrator_config": {
"action_duration": 0.1,
"method": "RK45",
"rtol": 1e-6,
"atol": 1e-8,
},
"random_seed": 0,
"physical_parameters": {
"fixed_values": {
"c_a_0": 0.3,
"c_p": 3.25,
"e_a": 41570,
"e_b": 45727,
"f": 0.0025,
"dh": 4157,
"k_0_a": 50_000,
"k_0_b": 100_000,
"r": 8.314,
"t_0": 300,
"v": 0.2,
"q_max": 5000,
"max_timestep": 100,
},
"sampled_values": {
"p": {"distribution": "choice", "choices": [780, 790], "size": 1}
},
},
}
env = make_cstr_environment(env_config)
env.reset()
done = False
while not done:
action = np.random.uniform(0.0, 1.0) # Raw scalar: normalized heat input
next_state, reward, terminated, truncated, info = env.step(action)
done = terminated or truncated
To render snapshots of the environment (and save them) see this script.
Conclusion
This tutorial has shown you how to create custom environments using the DEgym framework, following the methodology outlined in the official documentation. The key is to understand the separation between DAE components and RL components, and to implement each piece systematically starting with the DAE formulation.
The CSTR example demonstrates a complete, working implementation that you can use as a reference for your own environments.